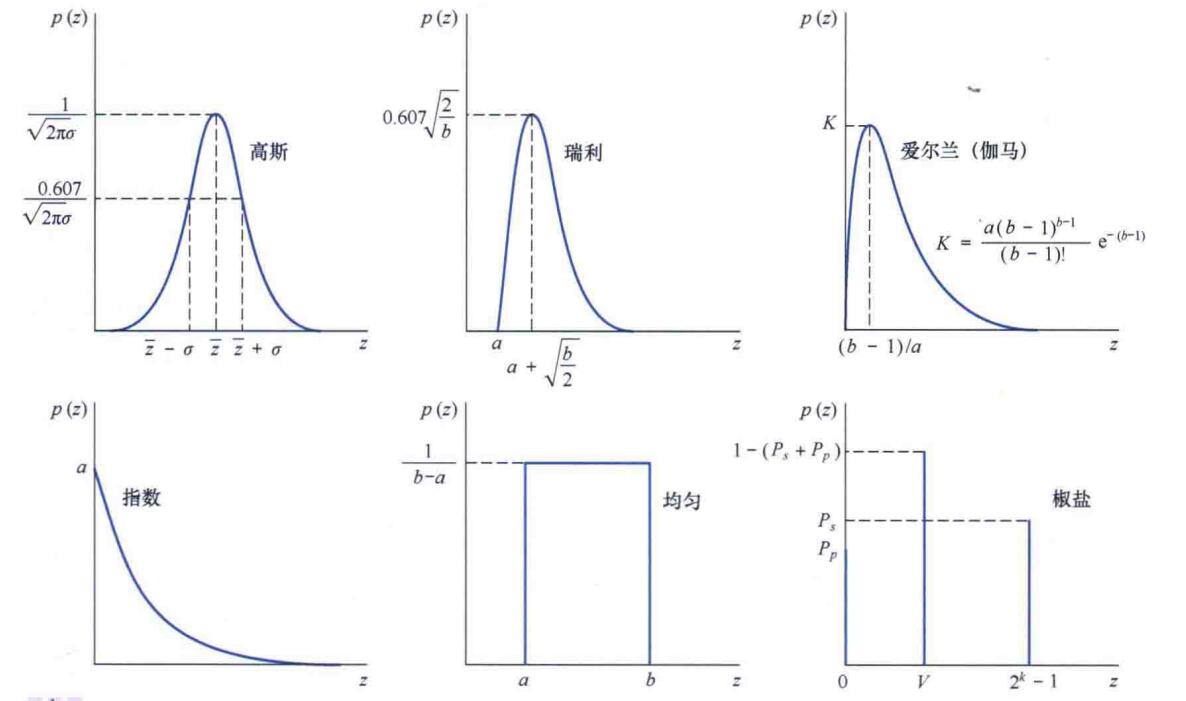
噪声分量的灰度值可视为随机变量,故讨论概率密度函数。
噪声模型
高斯噪声
概率密度函数(PDF,Probability Density Function):
p ( z ) = 1 2 π σ e − ( z − z ‾ ) 2 / 2 σ 2 , − ∞ < z < ∞ p(z)=\frac {1} {\sqrt{2\pi}\sigma}e^{-(z-\overline{z})^2/2\sigma^2},-\infty<z<\infty
p ( z ) = 2 π σ 1 e − ( z − z ) 2 / 2 σ 2 , − ∞ < z < ∞
其中, z z z z ‾ \overline{z} z z z z σ \sigma σ z z z
瑞利噪声
PDF为:
p ( z ) = { 2 b ( z − a ) e − ( z − a ) 2 / b , z ≥ a 0 , z < a p(z)=\begin{cases}
\frac{2} {b}(z-a)e^{-(z-a)^2/b}&,z\geq a\\
0&,z<a
\end{cases}
p ( z ) = { b 2 ( z − a ) e − ( z − a ) 2 / b 0 , z ≥ a , z < a
当z由瑞利PDF表征时,均值为 z ‾ = a + π b / 4 \overline{z}=a+\sqrt{\pi b/4} z = a + π b / 4 σ 2 = b ( 4 − π ) 4 \sigma^2=\frac{b(4-\pi)} {4} σ 2 = 4 b ( 4 − π )
爱尔兰(伽马)噪声
PDF为:
p ( z ) = { a b z b − 1 ( b − 1 ) ! e − a z , z ≥ 0 0 , z < 0 p(z)=\begin{cases}
\frac{a^bz^{b-1} } {(b-1)!}e^{-az}&,z\geq 0\\
0&,z<0
\end{cases}
p ( z ) = { ( b − 1 ) ! a b z b − 1 e − a z 0 , z ≥ 0 , z < 0
其中,a>b,z的均值为 z ‾ = a b \overline{z}=\frac{a} {b} z = b a σ 2 = b a 2 \sigma^2=\frac{b} {a^2} σ 2 = a 2 b
指数噪声
PDF为:
p ( z ) = { a e − a z , z ≥ 0 0 , z < 0 p(z)=\begin{cases}
ae^{-az}&,z\geq 0\\
0&,z<0
\end{cases}
p ( z ) = { a e − a z 0 , z ≥ 0 , z < 0
其中,a>0,z的均值为 z ‾ = 1 a \overline{z}=\frac{1} {a} z = a 1 σ 2 = 1 a 2 \sigma^2=\frac{1} {a^2} σ 2 = a 2 1
均匀噪声
PDF为:
p ( z ) = { 1 b − a , a ≤ z ≤ b 0 , 其他 p(z)=\begin{cases}
\frac{1} {b-a}&,a\leq z\leq b\\
0&,其他
\end{cases}
p ( z ) = { b − a 1 0 , a ≤ z ≤ b , 其 他
其中,z的均值为 z ‾ = a + b 2 \overline{z}=\frac{a+b} {2} z = 2 a + b σ 2 = ( b − a ) 2 12 \sigma^2=\frac{(b-a)^2} {12} σ 2 = 1 2 ( b − a ) 2
椒盐噪声
PDF为:
p ( z ) = { P s , z = 2 k − 1 P p , z = 0 1 − ( P s + P p ) , z = V p(z)=\begin{cases}
P_s&,z=2^k-1\\
P_p&,z=0\\
1-(P_s+P_p)&,z=V
\end{cases}
p ( z ) = ⎩ ⎪ ⎪ ⎨ ⎪ ⎪ ⎧ P s P p 1 − ( P s + P p ) , z = 2 k − 1 , z = 0 , z = V
其中,V是区间 0 < V < 2 k − 1 0<V<2^k-1 0 < V < 2 k − 1 P = P s + P p P=P_s+P_p P = P s + P p
椒盐噪声的均值为 z ‾ = ( 0 ) P p + K ( 1 − P s − P p ) + ( 2 k − 1 ) P s \overline{z}=(0)P_p+K(1-P_s-P_p)+(2^k-1)P_s z = ( 0 ) P p + K ( 1 − P s − P p ) + ( 2 k − 1 ) P s
方差为 σ 2 = ( 0 − z ‾ ) 2 P p + ( K − z ‾ ) 2 ( 1 − P s − P p ) + ( 2 k − 1 ) P s \sigma^2=(0-\overline{z})^2P_p+(K-\overline{z})^2(1-P_s-P_p)+(2^k-1)P_s σ 2 = ( 0 − z ) 2 P p + ( K − z ) 2 ( 1 − P s − P p ) + ( 2 k − 1 ) P s
判别噪声类别
椒盐噪声可以肉眼区分。
其他噪声需要取图像中灰度较为平滑的区域,使用灰度分布图判断。
由上图可知,选取较为平滑的区域,高斯噪声后的直方图与高斯噪声PDF类似,而均匀噪声后的直方图与均匀噪声PDF类似。
上图代码实现
有关函数:
1 2 3 4 5 void fill (InputOutputArray mat, int distType, InputArray a, InputArray b, bool saturateRange = false )
该函数属于OpenCV 4的RNG类,是一个非静态成员函数,因此在使用的时候不能像使用正常函数一样的直接使用,而需要首先创建一个RNG类的变量,之后通过访问这个变量中函数进行调用这个函数。
该函数参数如下:
mat:用于存放随机数的矩阵,目前只支持低于5通道的矩阵。
distType:随机数分布形式选择标志,目前生成的随机数支持均匀分布(RNG::UNIFORM,0)和高斯分布(RNG::NORMAL,1)。
a:确定分布规律的参数。当选择均匀分布时,该参数表示均匀分布的最小下限;当选择高斯分布时,该参数表示高斯分布的均值。
b:确定分布规律的参数。当选择均匀分布时,该参数表示均匀分布的最大上限;当选择高斯分布时,该参数表示高斯分布的标准差。
saturateRange:预饱和标志,仅用于均匀分布。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 #include <iostream> #include <opencv2/opencv.hpp> void GaussianNoise (cv::Mat input, cv::Mat &output) cv::RNG rng; cv::Mat noice = input.clone (); output = input.clone (); rng.fill (noice, cv::RNG::NORMAL, 10 , 50 ); output = input + noice; } void UniformNoise (cv::Mat input, cv::Mat &output) cv::RNG rng; cv::Mat noice = input.clone (); output = input.clone (); rng.fill (noice, cv::RNG::UNIFORM, 10 , 50 ); output = input + noice; } void getHist (cv::Mat& input, cv::Mat& histImage) cv::Mat ioa (cv::Mat::zeros(input.size(), CV_8U)) ; for (int i = 0 ; i < 100 ; i ++) for (int j = 900 ; j < 1000 ; j ++) ioa.at <uchar>(i, j) = 255 ; cv::rectangle (input, cv::Rect (900 , 0 , 100 , 100 ), cv::Scalar (0 , 0 , 255 ), 5 ); cv::Mat hist; int hsize = 256 ; float ranges[] = { 0 , 256 }; const float *hRanges = { ranges }; cv::calcHist (&input, 1 , 0 , ioa, hist, 1 , &hsize, &hRanges, true , false ); int hist_h = 300 , hist_w = 512 ; int bin_w = hist_w / hsize; histImage = cv::Mat (hist_h, hist_w, CV_8UC3, cv::Scalar (255 , 255 , 255 )); cv::normalize (hist, hist, 0 , hist_h, cv::NORM_MINMAX, -1 , cv::Mat ()); for (int i = 1 ; i < hsize; i ++) cv::line (histImage, cv::Point ((i - 1 ) * bin_w, hist_h - cvRound (hist.at <float >(i - 1 ))), cv::Point ((i) *bin_w, hist_h - cvRound (hist.at <float >(i))), cv::Scalar (100 , 100 , 100 ), 2 ); } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2, hi1, hi2, hi; GaussianNoise (input, output1); UniformNoise (input, output2); getHist (input, hi); getHist (output1, hi1); getHist (output2, hi2); cv::namedWindow ("原图" , cv::WINDOW_NORMAL); cv::imshow ("原图" , input); cv::namedWindow ("原图直方图" , cv::WINDOW_NORMAL); cv::imshow ("原图直方图" , hi); cv::namedWindow ("高斯噪声后图" , cv::WINDOW_NORMAL); cv::imshow ("高斯噪声后图" , output1); cv::namedWindow ("均匀噪声后图" , cv::WINDOW_NORMAL); cv::imshow ("均匀噪声后图" , output2); cv::namedWindow ("高斯噪声后直方图" , cv::WINDOW_NORMAL); cv::imshow ("高斯噪声后直方图" , hi1); cv::namedWindow ("均匀噪声后直方图" , cv::WINDOW_NORMAL); cv::imshow ("均匀噪声后直方图" , hi2); cv::waitKey (0 ); return 0 ; }
常见的空间滤波方法
均值滤波器
统计排序滤波器
中值滤波器:处理单极、双极冲激噪声更好,也能有效降低某些随机噪声,丢失细节更少。
最大最小值滤波器:分别减少暗点和亮点,如胡椒噪声和盐粒噪声。可通过最大值滤波器削减胡椒噪声,通过最小值滤波器削减盐粒噪声。
中点滤波器:适合处理随机分布的噪声,如高斯噪声和均匀噪声。
修正阿尔法均值滤波器:适合处理多种混合噪声,如高斯噪声和椒盐噪声。
自适应滤波器
自适应局部降噪滤波器:与均值滤波器比结果更清晰。
自适应中值滤波器:平滑时保留图像细节。
均值滤波器
算术平均滤波器
算术均值滤波器:也是盒式滤波器,平滑图像中的局部变化,会降低噪声,也会模糊图像。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = 1 m n ∑ ( r , c ) ∈ S x y g ( r , c ) \hat f(x,y)=\frac{1} {mn}\sum_{(r,c)\in S_{xy} }g(r,c)
f ^ ( x , y ) = m n 1 ( r , c ) ∈ S x y ∑ g ( r , c )
代码(Salt的相关代码见最后):
相关函数:
1 void copyMakeBorder (InputArray src, OutputArray dst, int top, int bottom, int left, int right, int borderType, const Scalar& value = Scalar())
该函数用于扩充图像边界,参数如下:
src:输入图像;
dst:输出与输入图像相同类型图像;
top、bottom、left、right:在图像的四个方向上扩充像素值;
borderType:边界类型。取值BORDER_CONSTANT为复制指定常量扩展边界;取值为BORDER_REPLICATE为自我复制扩展边界;取值为BORDER_REFLECT为通过镜像复制扩展边界;取值为BORDER_WRAP为复制对边像素扩展边界;
value:边界类型为BORDER_CONSTANT时表示边界值。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 #include <iostream> #include <opencv2/opencv.hpp> #include "Salt.h" void ArithmeticMeanFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int sum = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) sum += input.at <uchar>(i + x, j + y); output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = round (sum / (m * n)); } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); ArithmeticMeanFilter (input, output1, 7 , 7 ); cv::blur (input, output2, cv::Size (7 , 7 )); cv::namedWindow ("after1" , cv::WINDOW_NORMAL); cv::imshow ("after1" , output1); cv::namedWindow ("after2" , cv::WINDOW_NORMAL); cv::imshow ("after2" , output2); cv::waitKey (0 ); return 0 ; }
效果展示:
几何均值滤波器
几何均值滤波器:比算术均值滤波器相比丢失细节少。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = [ ∏ ( r , c ) ∈ S x y g ( r , c ) ] 1 m n \hat f(x,y)=\bigg[\prod_{(r,c)\in S_{xy} }g(r,c)\bigg]^{\frac {1} {mn} }
f ^ ( x , y ) = [ ( r , c ) ∈ S x y ∏ g ( r , c ) ] m n 1
代码(Salt的相关代码见最后):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 #include <iostream> #include <opencv2/opencv.hpp> #include "Salt.h" void GeometricMeanFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); double k = m * n; for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { double sum = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) sum += log10 (input.at <uchar>(i + x, j + y) + 0.1 ); sum /= k; output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = round (pow (10 , sum)); } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); GeometricMeanFilter (input, output1, 7 , 7 ); cv::blur (input, output2, cv::Size (7 , 7 )); cv::namedWindow ("几何均值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("几何均值滤波器" , output1); cv::namedWindow ("算术均值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("算术均值滤波器" , output2); cv::waitKey (0 ); return 0 ; }
效果展示:
谐波均值滤波器
谐波平均滤波器:适合处理高斯噪声及盐粒噪声,但不能处理胡椒噪声。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = m n ∑ ( r , c ) ∈ S x y 1 g ( r , c ) \hat f(x,y)=\frac{mn} {\sum_{(r,c)\in S_{xy} }\frac{1} {g(r,c)} }
f ^ ( x , y ) = ∑ ( r , c ) ∈ S x y g ( r , c ) 1 m n
代码(Salt的相关代码见最后):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 #include <iostream> #include <opencv2/opencv.hpp> #include "Salt.h" void HarmonicMeanFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); double k = m * n; for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { double sum = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) sum += 1.0 / (input.at <uchar>(i + x, j + y) + 0.1 ); sum = k / sum; output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = sum; } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); HarmonicMeanFilter (input, output1, 7 , 7 ); cv::blur (input, output2, cv::Size (7 , 7 )); cv::namedWindow ("谐波均值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("谐波均值滤波器" , output1); cv::namedWindow ("算术均值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("算术均值滤波器" , output2); cv::waitKey (0 ); return 0 ; }
效果展示:
反谐波均值滤波器
反谐波均值滤波器:调节阶数有不同的效果,适用于降低或消除椒盐噪声,当阶数Q为正时,可消除胡椒噪声;当阶数Q为负时,可消除盐粒噪声;Q=0时简化为算术平均滤波器;Q=-1时简化为谐波平均滤波器。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = ∑ ( r , c ) ∈ S x y g ( r , c ) Q + 1 ∑ ( r , c ) ∈ S x y g ( r , c ) Q \hat f(x,y)=\frac{\sum_{(r,c)\in S_{xy} }g(r,c)^{Q+1} } {\sum_{(r,c)\in S_{xy} }g(r,c)^Q}
f ^ ( x , y ) = ∑ ( r , c ) ∈ S x y g ( r , c ) Q ∑ ( r , c ) ∈ S x y g ( r , c ) Q + 1
代码(Salt的相关代码见最后):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 #include <iostream> #include <opencv2/opencv.hpp> #include "Salt.h" void AntiharmonicAveragingFilter (cv::Mat input, cv::Mat &output, int m, int n, int q) output = input.clone (); cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { double sum1 = 0 , sum2 = 0 , sum; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { sum1 += pow (input.at <uchar>(i + x, j + y), q + 1 ); sum2 += pow (input.at <uchar>(i + x, j + y), q); } sum = sum1 / sum2; output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = cv::saturate_cast <uchar>(sum); } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); AntiharmonicAveragingFilter (input, output1, 7 , 7 , 2 ); AntiharmonicAveragingFilter (input, output2, 7 , 7 , -2 ); cv::namedWindow ("反谐波均值滤波器:Q=2" , cv::WINDOW_NORMAL); cv::imshow ("反谐波均值滤波器:Q=2" , output1); cv::namedWindow ("反谐波均值滤波器:Q=-2" , cv::WINDOW_NORMAL); cv::imshow ("反谐波均值滤波器:Q=-2" , output2); cv::waitKey (0 ); return 0 ; }
效果展示:
1 2 3 4 5 #pragma once #include <opencv2/opencv.hpp> #include <random> void Salt (cv::Mat input, int n) ;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 #include "Salt.h" void Salt (cv::Mat input, int n) std::default_random_engine generator; std::uniform_int_distribution<int >row (0 , input.rows - 1 ); std::uniform_int_distribution<int >col (0 , input.cols - 1 ); int i, j; for (int k = 0 ; k < n; k ++) { i = row (generator); j = col (generator); if (input.channels () == 1 ) input.at <uchar>(i, j) = 255 ; else if (input.channels () == 3 ) input.at <cv::Vec3b>(i, j) = cv::Vec3b (255 , 255 , 255 ); } }
统计排序滤波器
中值滤波器
处理单极、双极冲激噪声更好,也能有效降低某些随机噪声,丢失细节更少。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = m e d i a n ( r , c ) ∈ S x y { g ( r , c ) } \hat f(x,y)=median_{(r,c)\in S_{xy} }\{g(r,c)\}
f ^ ( x , y ) = m e d i a n ( r , c ) ∈ S x y { g ( r , c ) }
代码实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 #include <iostream> #include <vector> #include <opencv2/opencv.hpp> #include "Salt.h" void MedianFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); int num = m * n; std::vector<uchar> arry (num) ; cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int h = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { arry[h] = input.at <uchar>(i + x, j + y); h += 1 ; } std::sort (arry.begin (), arry.end ()); output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = arry[(num - 1 ) / 2 ]; } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); MedianFilter (input, output1, 7 , 7 ); cv::medianBlur (input, output2, 7 ); cv::namedWindow ("自实现中值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("自实现中值滤波器" , output1); cv::namedWindow ("OpenCV自带中值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("OpenCV自带中值滤波器" , output2); cv::waitKey (0 ); return 0 ; }
效果展示:
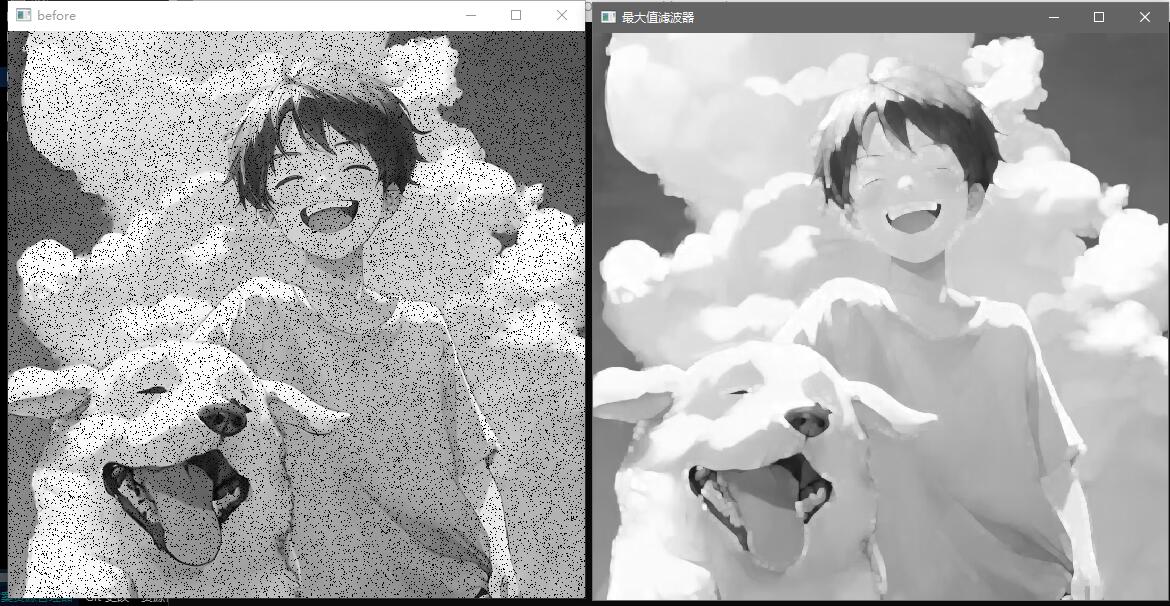
最大值滤波器
滤波窗口的最大值作为滤波结果,可通过最大值滤波器削减胡椒噪声,也可削弱明色区域相邻的暗色区域。其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = max ( r , c ) ∈ S x y { g ( r , c ) } \hat f(x,y)=\max_{(r,c)\in S_{xy} }\{g(r,c)\}
f ^ ( x , y ) = ( r , c ) ∈ S x y max { g ( r , c ) }
代码实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 #include <iostream> #include <vector> #include <opencv2/opencv.hpp> #include "Salt.h" void MaxFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); int num = m * n; std::vector<uchar> arry (num) ; cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int h = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { arry[h] = input.at <uchar>(i + x, j + y); h += 1 ; } std::sort (arry.begin (), arry.end ()); output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = arry[num - 1 ]; } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); MaxFilter (input, output, 7 , 7 ); cv::namedWindow ("最大值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("最大值滤波器" , output); cv::waitKey (0 ); return 0 ; }
效果展示:
最小值滤波器
滤波窗口的最小值作为滤波结果,可通过最小值滤波器削减盐粒噪声,也可削弱暗色区域相邻的明色区域。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = min ( r , c ) ∈ S x y { g ( r , c ) } \hat f(x,y)=\min_{(r,c)\in S_{xy} }\{g(r,c)\}
f ^ ( x , y ) = ( r , c ) ∈ S x y min { g ( r , c ) }
代码实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 #include <iostream> #include <vector> #include <opencv2/opencv.hpp> #include "Salt.h" void MinFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); int num = m * n; std::vector<uchar> arry (num) ; cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int h = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { arry[h] = input.at <uchar>(i + x, j + y); h += 1 ; } std::sort (arry.begin (), arry.end ()); output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = arry[0 ]; } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); MinFilter (input, output, 7 , 7 ); cv::namedWindow ("最小值滤波器" , cv::WINDOW_NORMAL); cv::imshow ("最小值滤波器" , output); cv::waitKey (0 ); return 0 ; }
效果展示:
中点滤波器
滤波窗口的最大值和最小值的均值作为滤波结果,适合处理随机分布的噪声,如高斯噪声和均匀噪声。表达式如下,其中 f ^ \hat f f ^ S x y S_{xy} S x y g ( x , y ) g(x,y) g ( x , y )
f ^ ( x , y ) = 1 2 [ max ( r , c ) ∈ S x y { g ( r , c ) } + min ( r , c ) ∈ S x y { g ( r , c ) } ] \hat f(x,y)=\frac 12\bigg[\max_{(r,c)\in S_{xy} }\{g(r,c)\}+\min_{(r,c)\in S_{xy} }\{g(r,c)\}\bigg]
f ^ ( x , y ) = 2 1 [ ( r , c ) ∈ S x y max { g ( r , c ) } + ( r , c ) ∈ S x y min { g ( r , c ) } ]
代码实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 #include <iostream> #include <vector> #include <opencv2/opencv.hpp> #include "Salt.h" void MidPointFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); int num = m * n; std::vector<uchar> arry (num) ; cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int h = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { arry[h] = input.at <uchar>(i + x, j + y); h += 1 ; } std::sort (arry.begin (), arry.end ()); output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = round ((arry[0 ] + arry[num - 1 ]) / 2 ); } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); MidPointFilter (input, output, 7 , 7 ); cv::namedWindow ("中点滤波器" , cv::WINDOW_NORMAL); cv::imshow ("中点滤波器" , output); cv::waitKey (0 ); return 0 ; }
效果展示:
不太适合盐粒噪声
修正阿尔法均值滤波器
假设要在邻域 S x y S_{xy} S x y g ( r , c ) g(r,c) g ( r , c ) d d d d d d g ( r , c ) g(r,c) g ( r , c ) m n − 2 d mn-2d m n − 2 d
当 d = 0 d=0 d = 0 d = ( m n − 1 ) / 2 d=(mn-1)/2 d = ( m n − 1 ) / 2 d d d
f ^ ( x , y ) = 1 m n − 2 d ∑ ( r , c ) ∈ S x y g R ( r , c ) \hat f(x,y)=\frac{1} {mn-2d}\sum_{(r,c)\in S_{xy} }g_R(r,c)
f ^ ( x , y ) = m n − 2 d 1 ( r , c ) ∈ S x y ∑ g R ( r , c )
代码实现:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 #include <iostream> #include <vector> #include <opencv2/opencv.hpp> #include "Salt.h" void ModifiedAlphaMeanFilter (cv::Mat input, cv::Mat &output, int m, int n, int d) output = input.clone (); int num = m * n; std::vector<uchar> arry (num) ; cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int h = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x ++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { arry[h] = input.at <uchar>(i + x, j + y); h += 1 ; } std::sort (arry.begin (), arry.end ()); int sum = 0 ; for (int k = d; k < num - d - 1 ; k ++) sum += arry[k]; output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = round (sum / (num - 2 * d)); } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; Salt (input, 100000 ); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); ModifiedAlphaMeanFilter (input, output1, 7 , 7 , 3 ); ModifiedAlphaMeanFilter (input, output2, 7 , 7 , 9 ); cv::namedWindow ("修正阿尔法均值滤波器:d=3" , cv::WINDOW_NORMAL); cv::imshow ("修正阿尔法均值滤波器:d=3" , output1); cv::namedWindow ("修正阿尔法均值滤波器:d=9" , cv::WINDOW_NORMAL); cv::imshow ("修正阿尔法均值滤波器:d=9" , output2); cv::waitKey (0 ); return 0 ; }
效果展示:
1 2 3 4 5 6 #pragma once #include <opencv2/opencv.hpp> #include <random> void Salt (cv::Mat input, int n) ;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 #include "Salt.h" void Salt (cv::Mat input, int n) std::default_random_engine generator; std::uniform_int_distribution<int >row (0 , input.rows - 1 ); std::uniform_int_distribution<int >col (0 , input.cols - 1 ); int i, j; for (int k = 0 ; k < n; k ++) { i = row (generator); j = col (generator); if (input.channels () == 1 ) input.at <uchar>(i, j) = 255 ; else if (input.channels () == 3 ) input.at <cv::Vec3b>(i, j) = cv::Vec3b (255 , 255 , 255 ); } }
自适应滤波器
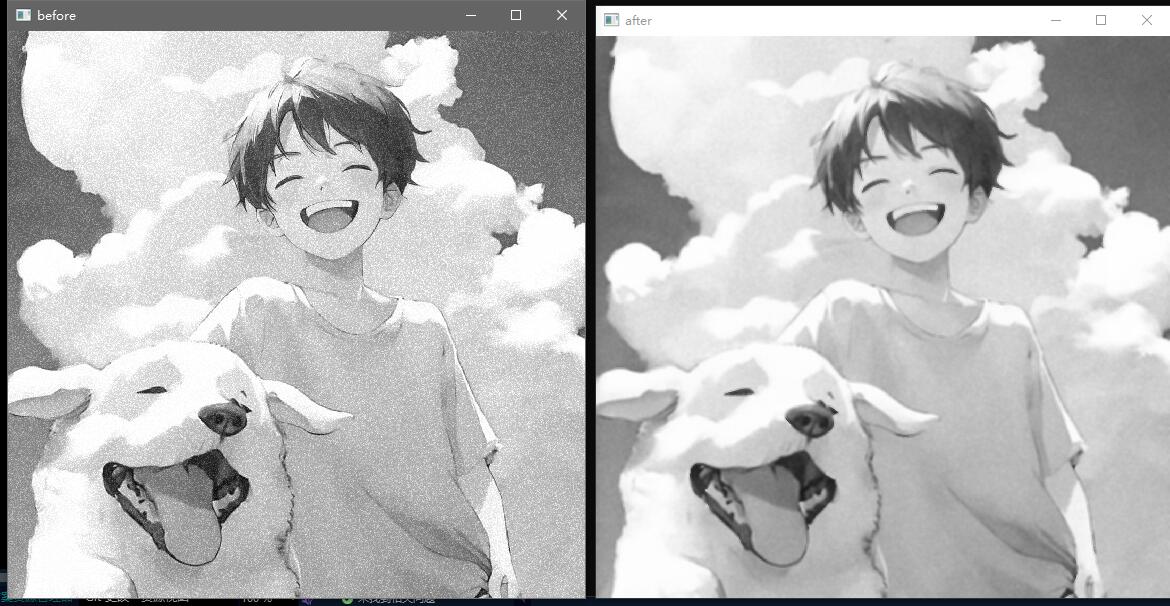
自适应局部降噪滤波器
滤波器对中心(x,y)的一个邻域 S x y S_{xy} S x y
噪声图像g(x,y),噪声方差 σ η 2 \sigma_\eta^2 σ η 2
S x y S_{xy} S x y z ‾ S x y \overline{z}_{S_{xy} } z S x y S x y S_{xy} S x y σ S x y 2 \sigma^2_{S_{xy} } σ S x y 2
希望滤波器满足:
噪声为0时,(x,y)处的值g等于f。若噪声图像方差 σ η 2 = 0 \sigma^2_\eta=0 σ η 2 = 0
高局部方差通常与边缘相关,且应保留这些边缘。若局部方差 σ S x y 2 \sigma^2_{S_{xy} } σ S x y 2 σ η 2 \sigma_\eta^2 σ η 2
当局部区域的性质与整个图像的性质相同时,则两个方差相等,滤波器返回 S x y S_{xy} S x y
处理步骤:
计算噪声图像方差 σ η 2 \sigma^2_\eta σ η 2
计算滤波器窗口内像素的均值 z S s y z_{S_{sy} } z S s y σ S x y 2 \sigma^2_{S_{xy} } σ S x y 2
利用下式计算:
f ^ ( x , y ) = g ( x , y ) − σ η 2 σ S x y 2 [ g ( x , y ) − z S x y ‾ ] , σ η 2 σ S x y 2 ≤ 1 \hat{f}(x,y)=g(x,y)-\frac{\sigma^2_{\eta} } {\sigma^2_{S_{xy} }}\big[g(x,y)-\overline{z_{S_{xy} }}\big],\frac{\sigma^2_{\eta} } {\sigma^2_{S_{xy} }}\leq1
f ^ ( x , y ) = g ( x , y ) − σ S x y 2 σ η 2 [ g ( x , y ) − z S x y ] , σ S x y 2 σ η 2 ≤ 1
代码:
涉及OpenCV函数:
1 void meanStdDev (InputArray src, OutputArray mean, OutputArray stddev, InputArray mask=noArray())
参数分别为:
src:输入矩阵
mean:输出均值
stddev:输出标准差
mask:可选参数,掩码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 #include <iostream> #include <opencv2/opencv.hpp> void GaussianNoise (cv::Mat input, cv::Mat &output) cv::RNG rng; cv::Mat noice = input.clone (); output = input.clone (); rng.fill (noice, cv::RNG::NORMAL, 10 , 20 ); output = input + noice; } void AdaptiveLocalNoiseReductionFilter (cv::Mat input, cv::Mat &output, int m, int n) output = input.clone (); cv::Mat arry (1 , m * n, CV_8U) ; cv::copyMakeBorder (input, input, (m - 1 ) / 2 , (m - 1 ) / 2 , (n - 1 ) / 2 , (n - 1 ) / 2 , cv::BORDER_REFLECT); cv::Mat mean1, stddev1, mean2, stddev2; cv::meanStdDev (input, mean1, stddev1); double _stddev1, _mean2, _stddev2; _stddev1 = stddev1. at <double >(0 , 0 ); for (int i = (m - 1 ) / 2 ; i < input.rows - (m - 1 ) / 2 ; i ++) for (int j = (n - 1 ) / 2 ; j < input.cols - (n - 1 ) / 2 ; j ++) { int h = 0 ; for (int x = -(m - 1 ) / 2 ; x <= (m - 1 ) / 2 ; x ++) for (int y = -(n - 1 ) / 2 ; y <= (n - 1 ) / 2 ; y ++) { arry.at <uchar>(h) = input.at <uchar>(i + x, j + y); h ++; } cv::meanStdDev (arry, mean2, stddev2); _stddev2 = stddev2. at <double >(0 , 0 ); _mean2 = mean2. at <double >(0 , 0 ); double k = (_stddev1 * _stddev1) / (_stddev2 * _stddev2 + 0.00001 ); if (k <= 1 ) output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = input.at <uchar>(i, j) - k * (input.at <uchar>(i, j) - _mean2); else output.at <uchar>(i - (m - 1 ) / 2 , j - (n - 1 ) / 2 ) = _mean2; } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output; GaussianNoise (input, input); cv::namedWindow ("before" , cv::WINDOW_NORMAL); cv::imshow ("before" , input); AdaptiveLocalNoiseReductionFilter (input, output, 7 , 7 ); cv::namedWindow ("after" , cv::WINDOW_NORMAL); cv::imshow ("after" , output); cv::waitKey (0 ); return 0 ; }
效果展示:
自适应中值滤波器
通过判断,将中值或者原像素灰度值作为结果。记以下符号:
z m i n z_{min} z m i n S x y S_{xy} S x y z m a x z_{max} z m a x S x y S_{xy} S x y z m e d z_{med} z m e d S x y S_{xy} S x y
z x y z_{xy} z x y ( x , y ) (x,y) ( x , y ) S m a x S_{max} S m a x S x y S_{xy} S x y
代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 #include <iostream> #include <vector> #include <opencv2/opencv.hpp> #include "Salt.h" void GaussianNoise (cv::Mat input, cv::Mat &output) cv::RNG rng; cv::Mat noice = input.clone (); output = input.clone (); rng.fill (noice, cv::RNG::NORMAL, 10 , 50 ); output = input + noice; } uchar AdaptiveMedian (cv::Mat input, int i, int j, int filter_size, int maxsize) int num = filter_size * filter_size; std::vector<uchar> arry (num) ; int h = 0 ; for (int x = -(filter_size - 1 ) / 2 ; x <= (filter_size - 1 ) / 2 ; x ++) for (int y = -(filter_size - 1 ) / 2 ; y <= (filter_size - 1 ) / 2 ; y ++) { arry[h] = input.at <uchar>(i + x, j + y); h ++; } sort (arry.begin (), arry.end ()); int z_min = arry[0 ]; int z_med = arry[(num - 1 ) / 2 ]; int z_max = arry[num - 1 ]; int z_xy = input.at <uchar>(i, j); if (z_med > z_min and z_med < z_max) { if (z_xy > z_min and z_xy < z_max) return z_xy; else return z_med; } else { filter_size += 2 ; if (filter_size <= maxsize) return AdaptiveMedian (input, i, j, filter_size, maxsize); else return z_med; } } void AdaptiveMedianFilter (cv::Mat input, cv::Mat &output, int maxsize) output = input.clone (); cv::copyMakeBorder (input, input, (maxsize - 1 ) / 2 , (maxsize - 1 ) / 2 , (maxsize - 1 ) / 2 , (maxsize - 1 ) / 2 , cv::BORDER_REFLECT); for (int i = (maxsize - 1 ) / 2 ; i < input.rows - (maxsize - 1 ) / 2 ; i ++) for (int j = (maxsize - 1 ) / 2 ; j < input.cols - (maxsize - 1 ) / 2 ; j ++) { int filter_size = 3 ; output.at <uchar>(i - (maxsize - 1 ) / 2 , j - (maxsize - 1 ) / 2 ) = AdaptiveMedian (input, i, j, filter_size, maxsize); } } int main () cv::Mat input = cv::imread ("src/test.jpg" , 0 ); cv::Mat output1, output2; cv::Mat noise1 = input.clone (), noise2 = input.clone (); GaussianNoise (input, noise1); Salt (input, noise2, 100000 ); cv::namedWindow ("高斯噪声" , cv::WINDOW_NORMAL); cv::imshow ("高斯噪声" , noise1); cv::namedWindow ("盐粒噪声" , cv::WINDOW_NORMAL); cv::imshow ("盐粒噪声" , noise2); AdaptiveMedianFilter (noise1, output1, 7 ); AdaptiveMedianFilter (noise2, output2, 7 ); cv::namedWindow ("降低高斯噪声" , cv::WINDOW_NORMAL); cv::imshow ("降低高斯噪声" , output1); cv::namedWindow ("降低盐粒噪声" , cv::WINDOW_NORMAL); cv::imshow ("降低盐粒噪声" , output2); cv::waitKey (0 ); return 0 ; }
1 2 3 4 5 6 #pragma once #include <opencv2/opencv.hpp> #include <random> void Salt (cv::Mat input, cv::Mat &output, int n) ;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 #include "Salt.h" void Salt (cv::Mat input, cv::Mat &output, int n) output = input.clone (); std::default_random_engine generator; std::uniform_int_distribution<int >row (0 , input.rows - 1 ); std::uniform_int_distribution<int >col (0 , input.cols - 1 ); int i, j; for (int k = 0 ; k < n; k ++) { i = row (generator); j = col (generator); if (input.channels () == 1 ) output.at <uchar>(i, j) = 255 ; else if (input.channels () == 3 ) output.at <cv::Vec3b>(i, j) = cv::Vec3b (255 , 255 , 255 ); } }
效果展示;
对于盐粒噪声有奇效